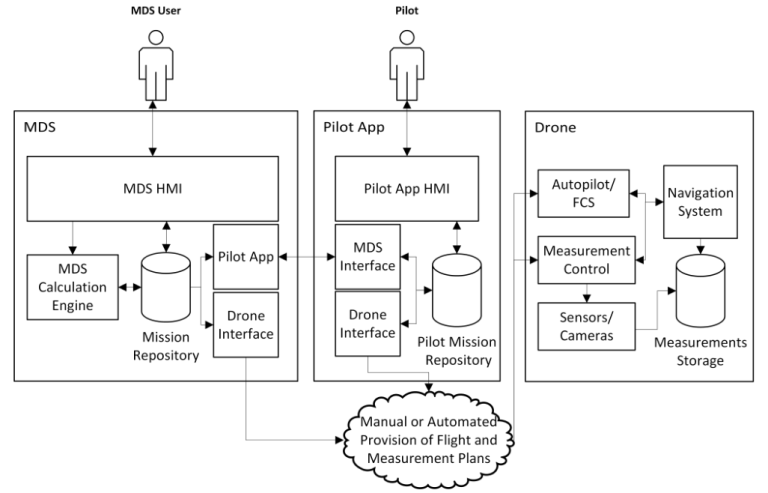
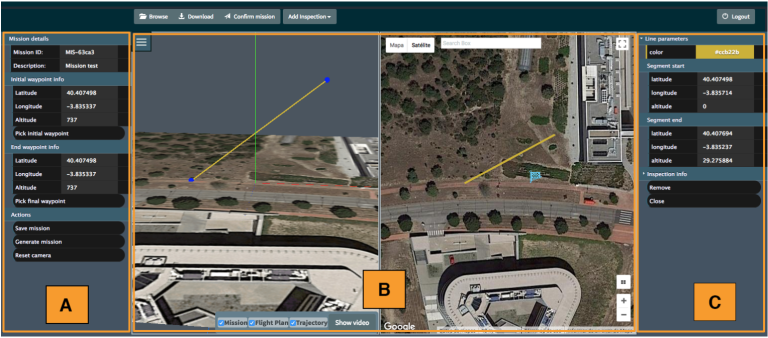
This paper describes a Mission Definition System and the automated flight process it enables to implement measurement plans for discrete infrastructure inspections using aerial platforms, and specifically multi-rotor drones. The mission definition aims at improving planning efficiency with respect to state-of-the-art waypoint-based techniques, using high-level mission definition primitives and linking them with realistic flight models to simulate the inspection in advance. It also provides flight scripts and measurement plans which can be executed by commercial drones. Its user interfaces facilitate mission definition, pre-flight 3D synthetic mission visualisation and flight evaluation. Results are delivered for a set of representative infrastructure inspection flights, showing the accuracy of the flight prediction tools in actual operations using automated flight control.
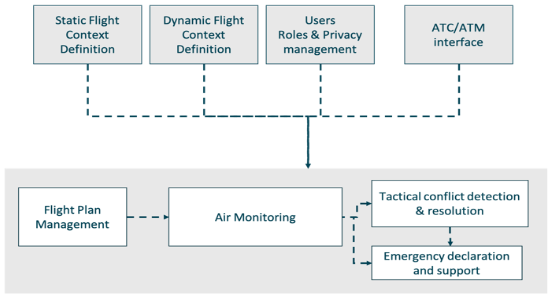
This paper describes the requirements of a flight planning tool for safe urban operations, which may be used to collaboratively design flights considering traffic constraints and limitations according to an unmanned traffic management system. Representative examples of flight planning are described, as calculated by a prototype flight planning tool.
